د لوژستیک لپاره د دوربین بیلټ لیږدونکی
مشخصات/پیرامیټونه
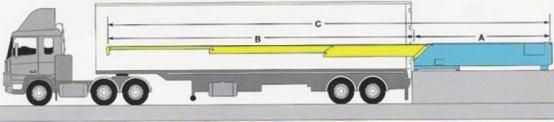
د ټیلسکوپیک بیلټ لیږدونکی په عمده ډول د ثابت برخې ، دوربین برخې ، دوربین چلولو میکانیزم ، د بیلټ رسولو میکانیزم ، د ټکر ضد میکانیزم او کنټرول سیسټم څخه جوړ شوی دی.
او د پیرودونکو اړتیاو پراساس ځینې مرستندویه میکانیزم هم شامل کړئ لکه د هوپ جوړښت ، د پورته کولو سیسټم ، د ختلو میکانیزم او داسې نور.
د ټیلسکوپیک ډوله ماشینونه کیدای شي دودیز یا همپ شوي ساختماني وي (د ټلیسکوپیک ماشینونه په عمده توګه په سختو شرایطو کې کارول کیږي، چیرې چې د موټرو د پورته کولو په وخت کې د ټیلسکوپیک ماشین په مخکینۍ پای کې د انٹرفیس تنظیم کول اسانه دي).
د ټیلسکوپیک لیږدونکي مختلف جوړښت:
ثابت ټیلسکوپیک لیږدونکی،
متوجه دوربین لیږدونکی / د پورته کیدو دوربین لیږدونکی د پورته کولو دوربین لیږدونکی
د حرکت وړ / ګرځنده ټیلسکوپیک لیږدونکی ډول ، د ګوزنیک ډول
پیرامیټونه
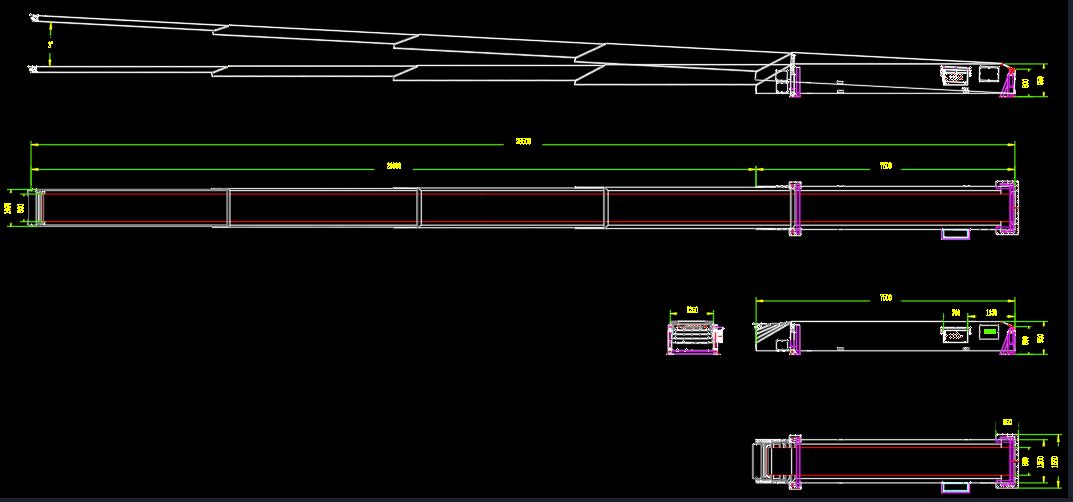
| نه. | سپیک | A (mm) | ب (mm) | C (mm) | E (mm) | د همپ جوړښت | د کمربند عرض (mm) |
| ثابت پای | د دوربین پای | ټول اوږدوالی | ثابت پای لوړوالی | ||||
| 1 | 3 | 5000 | 7000 | 12000 | ۸۰۰ | —— | ۸۰۰ |
| 2 | 6000 | ۸۴۰۰ | ۱۴۴۰۰ | ۸۰۰ | اختیاري | ||
| 3 | 4 | 6000 | ۱۲۶۰۰ | ۱۸۶۰۰ | ۹۰۰ | اختیاري | |
| 4 | 8000 | 17000 | 25000 | ۹۰۰ | اختیاري | ||
| 5 | 5 | 6000 | 16000 | 22000 | ۹۰۰ | اختیاري | |
| 6 | ۷۵۰۰ | 21000 | ۲۸۵۰۰ | ۹۰۰ | اختیاري |
اصلي تخنیکي پارامترونه


1. د لیږدونکي بیلټ بار وړلو ظرفیت له 60kg/㎡ څخه کم نه وي، د مثبت او منفي لیږد فعالیت سره.
2. کله چې بیلټ کار کوي، د بیلټ کیڼ او ښي سوینګ فاصله د 20mm څخه کم وي.
3. د رسولو سرعت: 20-45m/min (د فریکونسی کنټرول، لومړنی سرعت 30m/min دی)؛
د لوړ سرعت دوربین لیږدونکي سرعت:: 40-70m/min (د فریکونسی کنټرول، لومړنی سرعت 55 m/min دی).
4. اعظمي سرعت 10m/min، د تعدد وړ تعدد.
5. د کمربند عرض 800mm، ضخامت 3mm؛ PVK/PVC مواد.
6. فیوزلیج باید په کافي اندازه قوي وي، په بشپړ ډول په آرامۍ او د بشپړ بار سره غزیدلی وي، د درې برخې ماشین ډراپ باید له 50mm څخه کم وي، د څلور برخې څاڅکي باید له 120mm څخه کم وي، پنځه برخه باید د 150mm څخه کم وي.
7. د موټرو برانډ: SEW یا Nord.
9. د توسعې سلسله د لوړ کیفیت برانډ غوره کوي د سپروکټ غاښونو سطحه quenched سره.
د ترتیب کولو ځانګړتیاوې
1. د ټیلسکوپیک موټرو، د موټر چلولو موټرو او هیدرولیک سټیشنونه په کور دننه او بهر کې د مشهورو برانڈونو څخه دي.
2. د دوربین ماشین د پورته کولو او ښکته کولو زاویه عموما د -1° او 3° تر منځ وي، کوم چې د پروژې وضعیت سره سم تنظیم شوی.
3. کله چې دوربین او لیږدونکي موټور پیل شي، دا د ورو پیل او اشاره کولو فعالیت لري؛دا کولی شي د ټیلسکوپ کولو پرمهال د بریښنالیک لیږلو فعالیت درک کړي ، دا کولی شي د مخکینۍ او بیرته راګرځولو فعالیت درک کړي ، مخکینۍ او ریورس سویچنګ باید په جلا توګه کنټرول شي او اسانه لیږد.